O robô-inseto e seu cérebro artificial.
[Imagem: Daniel Gutierrez-Galan et al. - 10.1016/j.neucom.2019.11.007]
Inseto robótico
Pesquisadores espanhóis criaram um robô biomimético capaz de reproduzir todo o movimento de um inseto, incluindo andar, trotar e correr, de forma e velocidade naturais - nada de ter que acelerar a câmera para ver a coisa funcionar.O robô, batizado de NeuroPod, apresenta uma perda insignificante de equilíbrio e apenas pequenos retardos intermediários entre os passos.
E ele funciona quase como um ser vivo real, replicando movimentos reais em resposta a estímulos externos, o que minimiza o consumo de energia e reduz o tempo de computação.
Outra grande novidade é que o robô é controlado por um processador neuromórfico, projetado e construído com inspiração no cérebro.
Controle neural
O sistema usa apenas 30 neurônios artificiais, um hardware menor do que outros modelos similares, mas com um software capaz de modelar toda a atividade de movimento de um inseto.Na verdade ele é capaz de mais do que isso. Daniel Gutierrez e seus colegas das universidades de Sevilha e Cádiz afirmam que o sistema já permite a adição de sensores auditivos e visuais. Dessa maneira, o robô logo poderá responder a sons ou imagens específicas para modificar automaticamente seu padrão de movimento.
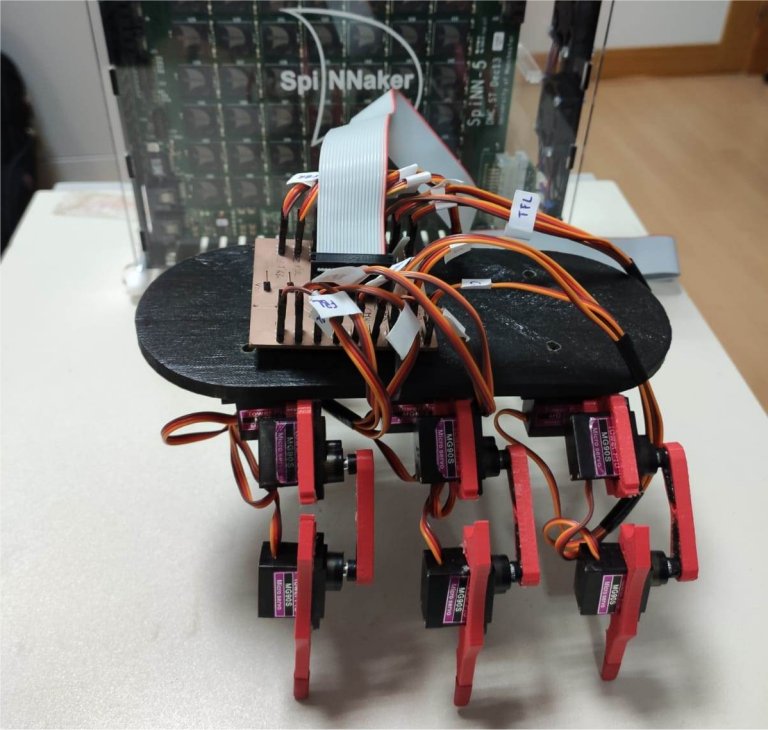
Não foi necessário construir o cérebro do inseto. O NeuroPod usa um processador neuromórfico SpiNNaker, que uma equipe da Universidade de Manchester, no Reino Unido, vem desenvolvendo há vários anos. Mas a equipe espanhola inovou com uma rede neural pulsada que não gera retardos na transmissão de informações, o que permitiu gerar o movimento do robô com uma latência muito próxima de zero.
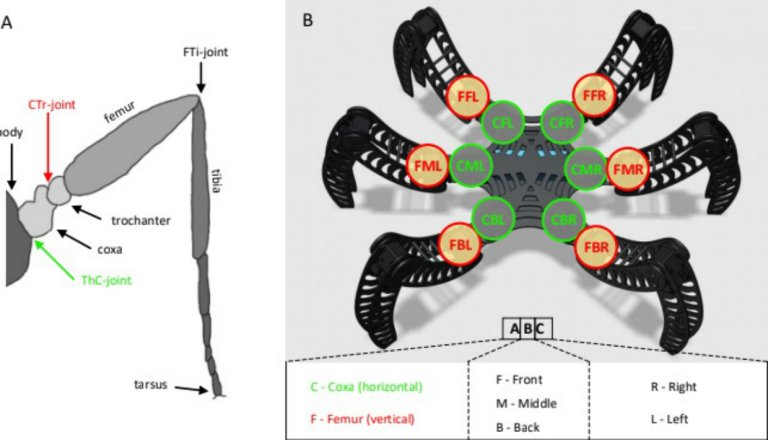
A rede neural foi programada com um modelo que detalha os movimentos do inseto.
[Imagem: Daniel Gutierrez-Galan et al. - 10.1016/j.neucom.2019.11.007]
Esqueleto e sistemas
O esqueleto do robô foi criado por impressão 3D e contém 18 servomotores, que simulam os sistemas nervoso e motor. Um decodificador converte o movimento mecânico em pulsos digitais, que são interpretados pelo controlador de movimento neuromórfico.Assim como em um animal, onde a medula espinhal cria padrões de movimento - como os produzidos ao respirar, correr ou nadar - o robô contém um "Gerador Central de Padrões" que distribui comandos de mudança de marcha para os diferentes sistemas, que por sua vez reagem modificando a velocidade ou intensidade da ação específica imediatamente. Dessa maneira, novos movimentos rítmicos são criados em resposta a um estímulo específico, sem retardos.
Bibliografia
Artigo: Neuropod: A real-time neuromorphic spiking CPG applied to roboticsAutores: Daniel Gutierrez-Galan, Juan P. Dominguez-Morales, Fernando Perez-Peña, Angel Jimenez-Fernandez, Alejandro Linares-Barranco
Revista: Neurocomputing
DOI: 10.1016/j.neucom.2019.11.007
Fonte: Portal Inovação Tecnológica https://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo=inseto-robotico-neuronios-artificiais&id=010180200605#.XuKnyUVKjIU
Comentários
Postar um comentário